LoMa: Local Feature Matching Revisited
† Equal contribution. Listing order is random.
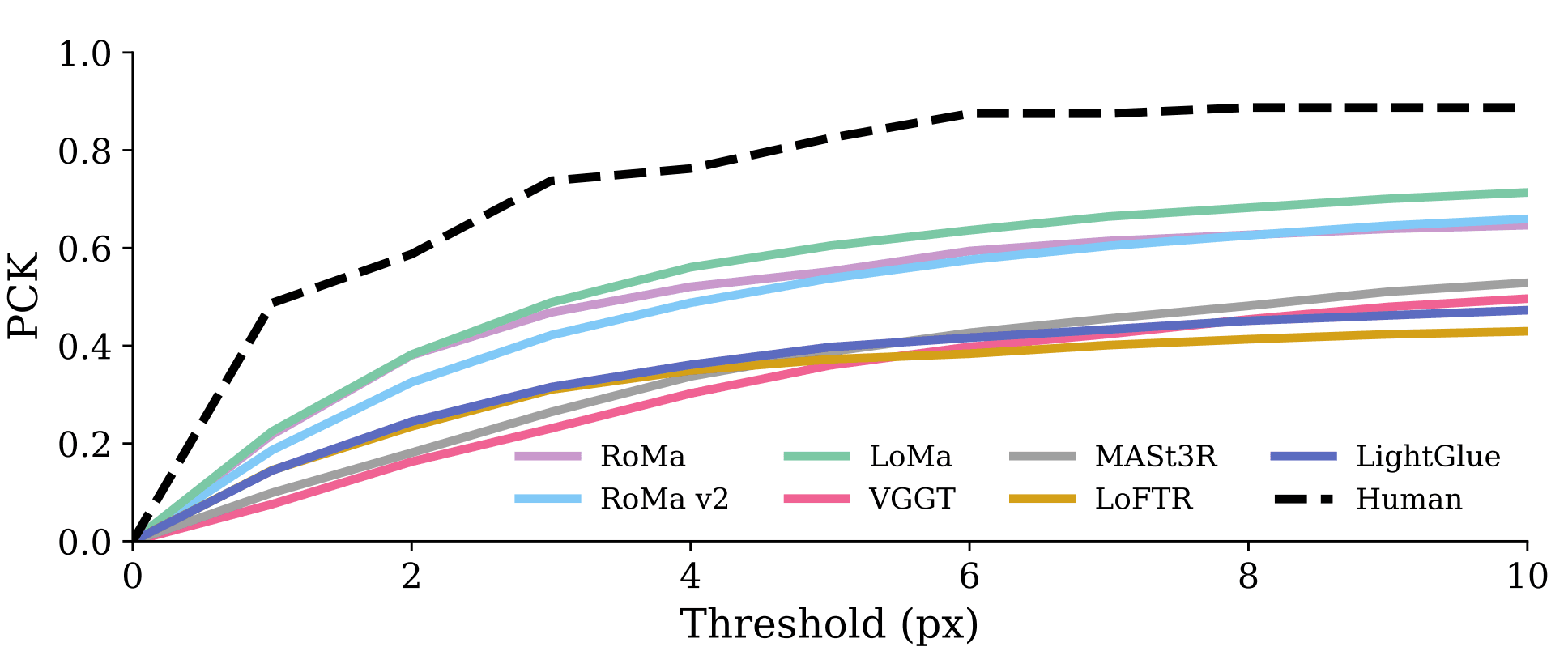
Figure 1. LoMa achieves state-of-the-art results, even beating the RoMa-family, on various benchmarks. Here we report percentage-of-correct keypoints for different pixel thresholds on HardMatch (a novel benchmark that we will release soon). We also provide a human baseline by querying independent annotators.
Abstract
Local feature matching has long been a fundamental component of 3D vision systems such as Structure-from-Motion (SfM), yet progress has lagged behind the rapid advances of modern data-driven approaches. The newer approaches, such as feed-forward reconstruction models, have benefited extensively from scaling dataset sizes, whereas local feature matching models are still only trained on a few mid-sized datasets. In this paper, we revisit local feature matching from a data-driven perspective. In our approach, which we call LoMa, we combine large and diverse data mixtures, modern training recipes, scaled model capacity, and scaled compute, resulting in remarkable gains in performance. Since current standard benchmarks mainly rely on collecting sparse views from successful 3D reconstructions, the evaluation of progress in feature matching has been limited to relatively easy image pairs. To address the resulting saturation of benchmarks, we collect 1000 highly challenging image pairs from internet data into a new dataset called HardMatch. Ground truth correspondences for HardMatch are obtained via manual annotation by the authors. In our extensive benchmarking suite, we find that LoMa makes outstanding progress across the board, outperforming the state-of-the-art method ALIKED+LightGlue by +18.6 mAA on HardMatch, +29.5 mAA on WxBS, +21.4 (1m, 10°) on InLoc, +24.2 AUC on RUBIK, and +12.4 mAA on IMC 2022.
Method

Figure 2. Method overview.
LoMa takes the best of prior work and combines it in a novel matching pipeline. The descriptor and matcher are trained on a large collection of 3D vision datasets. The resulting models achieve state-of-the-art results, even surpassing dense matchers on some benchmarks.
Results
Visual Localization
Comparison on Map-free, InLoc, and Oxford Day-and-Night. For InLoc and Oxford, we report % of queries localized within (0.25m, 2°) / (0.5m, 5°) / (1m, 10°).
| Method | Map-free | InLoc | Oxford | ||
|---|---|---|---|---|---|
| Prec. ↑ | AUC ↑ | DUC1 | DUC2 | Night | |
| Prior work | |||||
| SP+SG | 46.3 | 74.1 | 46.5/65.7/78.3 | 52.7/72.5/79.4 | 44.3/54.4/58.0 |
| SP+LG | 45.5 | 76.2 | 43.9/64.6/76.8 | 42.7/68.7/74.0 | 43.4/53.5/57.7 |
| DISK+LG | 43.2 | 60.7 | 43.4/60.6/74.2 | 36.6/53.4/67.2 | 14.8/17.5/20.1 |
| ALIKED+LG | 47.2 | 79.5 | 41.4/64.6/79.8 | 35.9/64.1/67.9 | 42.8/53.9/58.9 |
| Ours | |||||
| LoMa-B | 65.6 | 89.0 | 57.1/80.8/91.9 | 71.0/87.0/88.5 | 54.7/62.4/66.2 |
| LoMa-L | 67.6 | 89.4 | 59.1/80.8/91.9 | 71.0/84.0/87.8 | 56.0/64.6/69.2 |
| LoMa-G | 68.9 | 90.3 | 55.6/80.3/91.4 | 73.3/87.8/89.3 | 58.9/66.0/69.7 |
Relative Pose Estimation & Matching
AUC@20° on MegaDepth-1500 and ScanNet-1500. mAA@10px on WxBS and HardMatch.
| Method | MegaDepth ↑ | ScanNet ↑ | WxBS ↑ | HardMatch ↑ |
|---|---|---|---|---|
| ALIKED+LG | 79.3 | 43.5 | 43.9 | 35.7 |
| RoMa | 86.3 | 70.9 | 72.6 | 48.1 |
| MASt3R | 76.9 | 74.1 | 34.5 | 33.6 |
| LoMa-G | 84.0 | 70.0 | 73.4 | 54.3 |
BibTeX
@inproceedings{nordstrom2026loma,
title={LoMa: Local Feature Matching Revisited},
author={David Nordström and Johan Edstedt and Georg Bökman and Jonathan Astermark and Anders Heyden and Viktor Larsson and Mårten Wadenbäck and Michael Felsberg and Fredrik Kahl},
booktitle={Proceedings of the European Conference on Computer Vision (ECCV)},
year={2026}
}