
David Nordström
PhD Student in Deep Learning
I do
Supervised by Deep Learning
Fredrik Kahl
and Georg Bökman
.News
LoMa, Octic ViTs, and RoMa v2 all accepted at ECCV 2026.
MuM accepted at CVPR 2026. Our paper on Multi-View Masked Image Modeling for 3D Vision.
Pre-prints released for MuM and RoMa v2.
"Flopping for FLOPs" accepted as Spotlight Paper at ICML 2025.
Publications
Selected
LoMa
Local Feature Matching Revisited
D. Nordström*, J. Edstedt*, G. Bökman, J. Astermark, A. Heyden, V. Larsson, M. Wadenbäck, M. Felsberg, F. Kahl
ECCV 2026

Revisits local feature matching with large data mixtures and scaled compute. +18.6 mAA on HardMatch over ALIKED+LightGlue.
MuM
Multi-View Masked Image Modeling for 3D Vision
D. Nordström, J. Edstedt, F. Kahl, G. Bökman
CVPR 2026
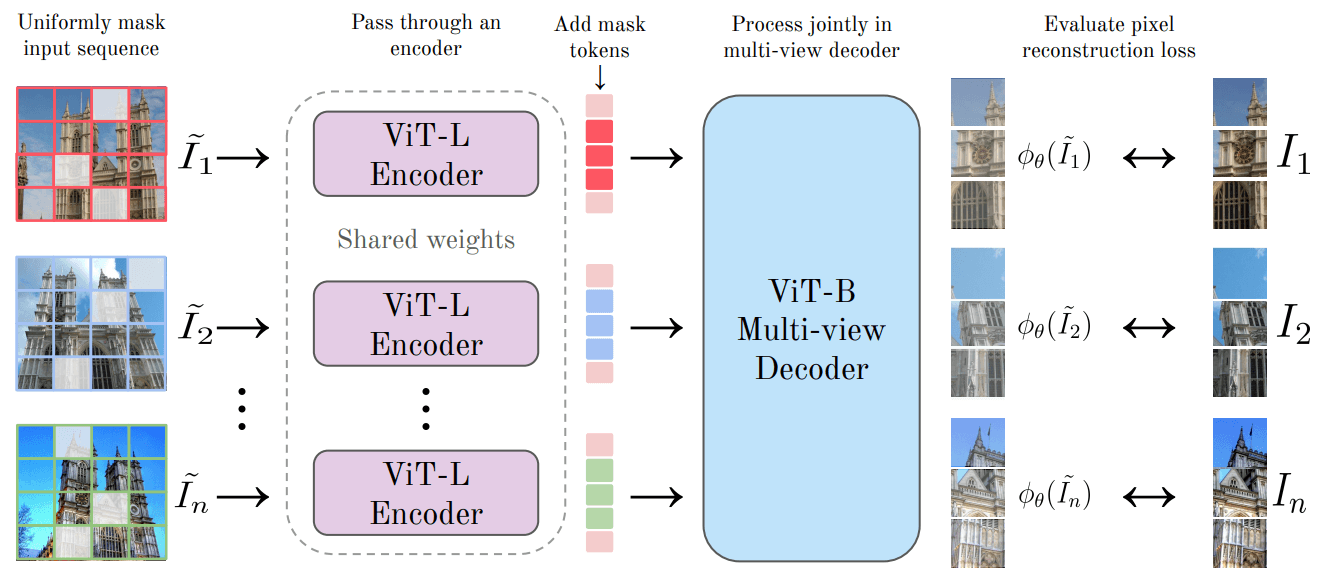
Feature encoder for 3D vision via multi-frame MAE. Beats DINOv3 and CroCo v2 on matching, reconstruction, and pose estimation.


Other
Open Source
davnords — bash
Just need the matcher? uv add lomatch works as a drop-in replacement for LightGlue in any SfM or visual localization pipeline.
Education
PhD in Geometric Deep Learning and 3D Computer Vision
Chalmers University of Technology
Research focus on equivariant neural networks, efficient deep learning architectures and 3D computer vision.
M.Sc. in Engineering Mathematics
Chalmers University of Technology
International Experience
Exchange Semester at UC Berkeley
Exchange Semester at Seoul National University
B.Sc. in Industrial Engineering
Chalmers University of Technology
5.0/5.0 GPA
B.Sc. in Economics
University of Gothenburg
Completed in parallel with Industrial Engineering degree
Teaching
Computer Vision
EEN020, Chalmers University of Technology
Deep Machine Learning
SSY340, Chalmers University of Technology
Talks
Feedforward 3D Reconstruction
Guest lecture in the Computer Vision course at Chalmers University of Technology.
Gallery

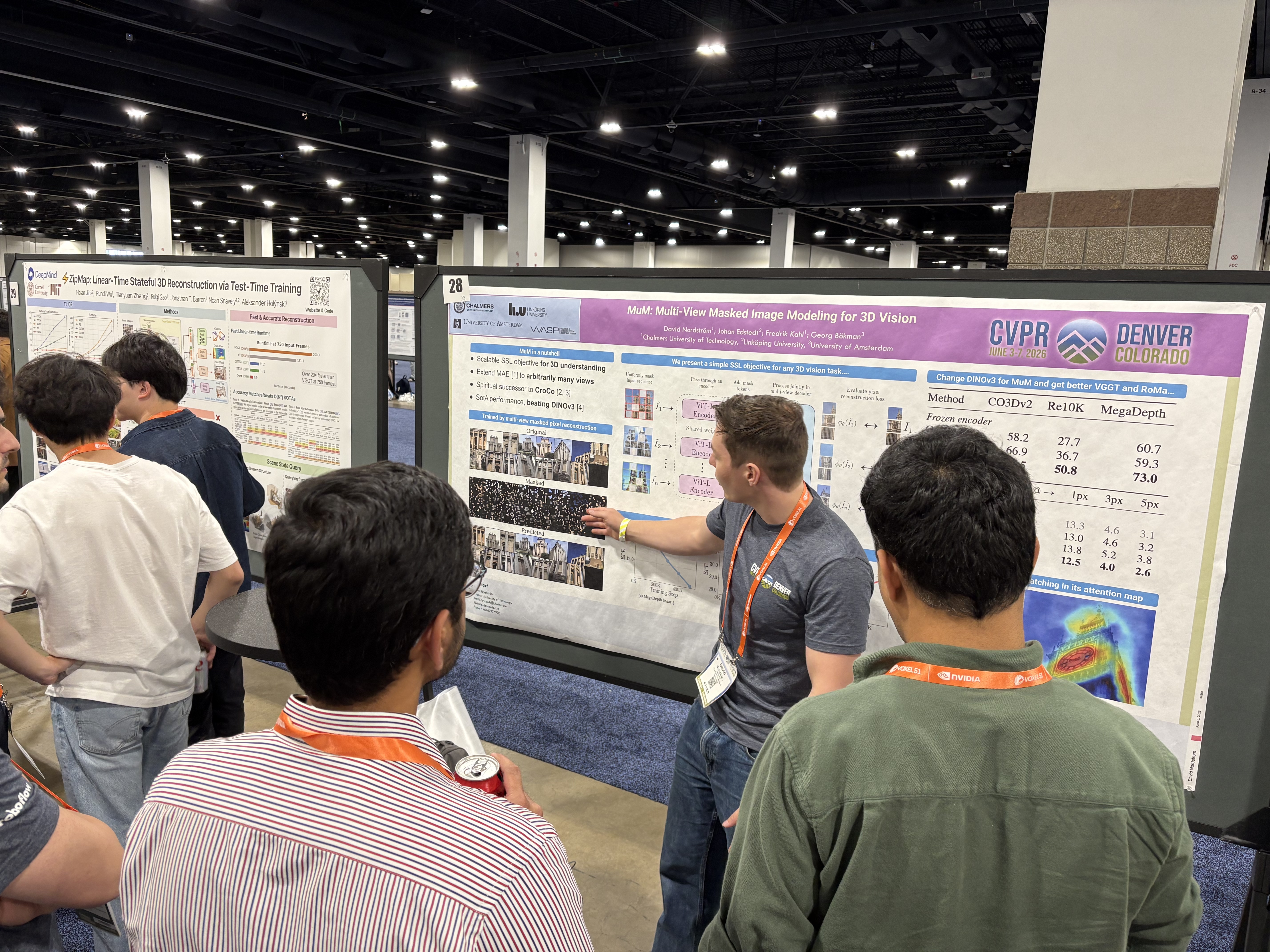
CVPR 2026
WASP in Singapore
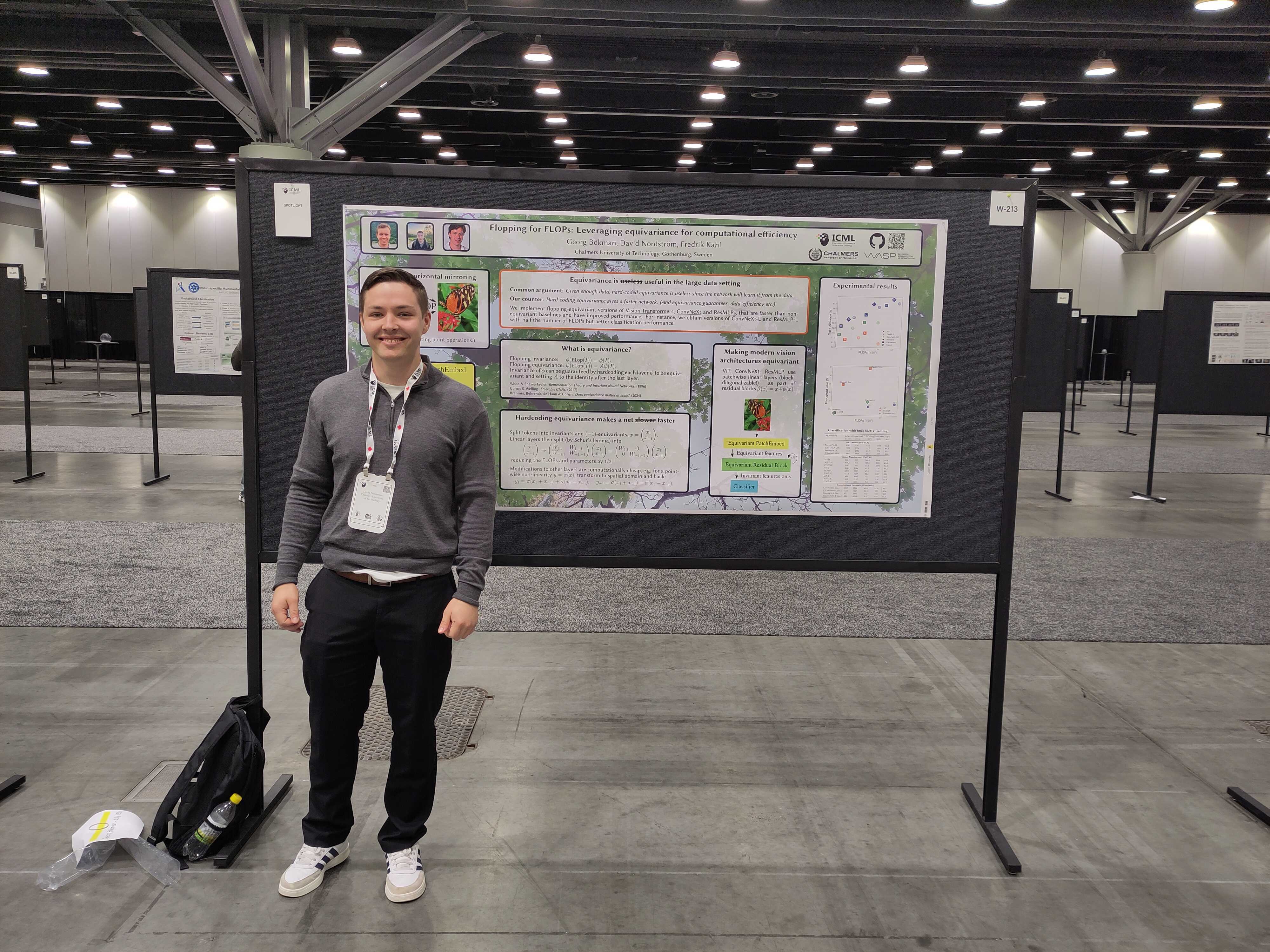
ICML 2025
WASP Winter Conference 2026
SSBA26 Presentation
Acknowledgements
My research is a result of a great collaboration withGeorg Bökman
and Johan Edstedt
, and my main supervisor Fredrik Kahl
, they have ben instrumental to all of my works. I am also grateful for the nice funding by the Wallenberg AI, Autonomous Systems and Software Program (WASP) which has given me many great benefits.Get in Touch
I'm always open to research collaborations and discussions.
Feel free to reach out via email for any inquiries or opportunities.